IDA 2026 IS NOW OPEN - SUBMIT BY APRIL 15 TO GET A 10% EARLY BIRD DISCOUNT.



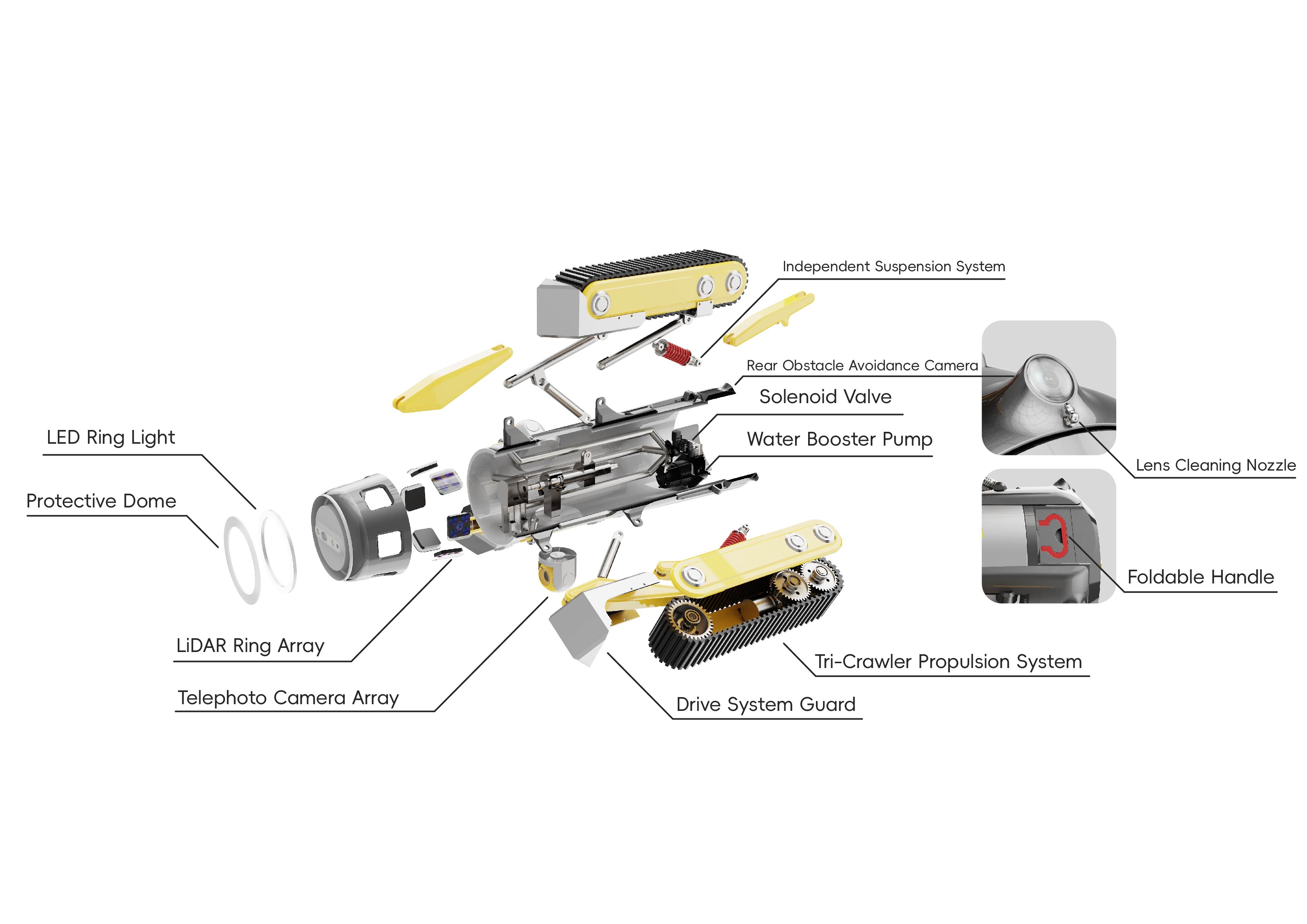
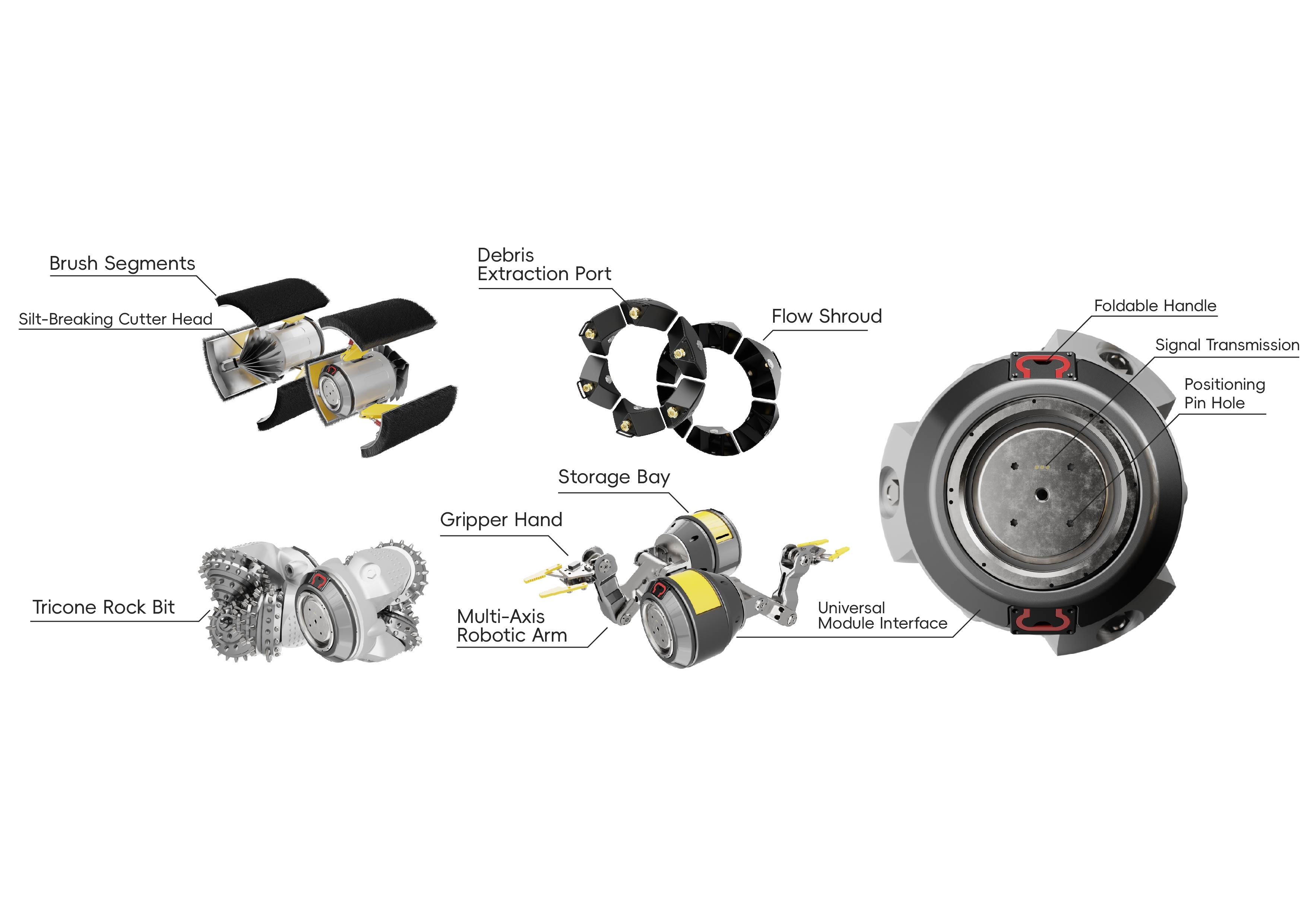
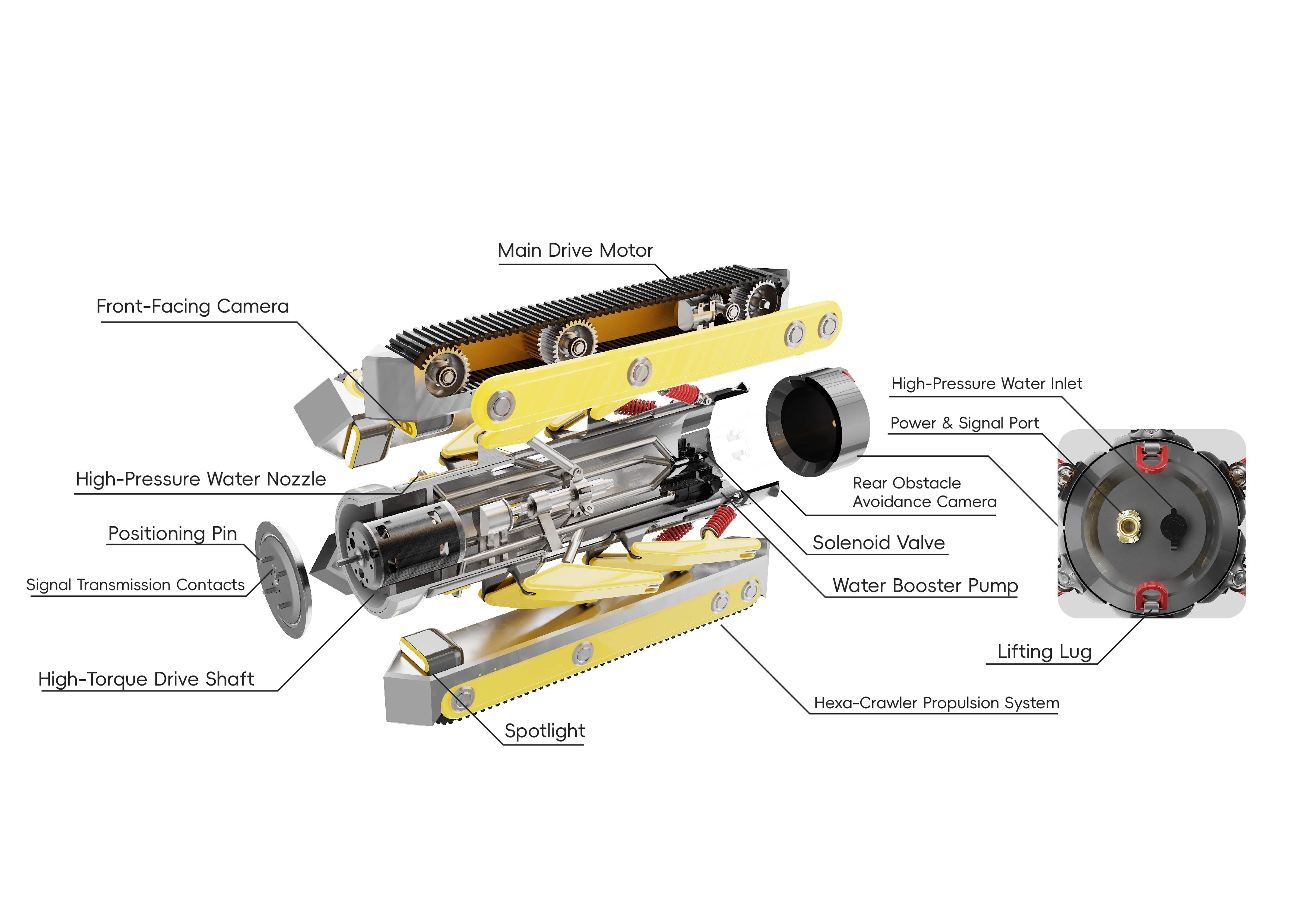
GEO-NAV is a heterogeneous dual-robot system that revolutionizes high-risk, inefficient pipeline O&M. It decouples tasks into two synergistic platforms: the RECON robot performs high-precision 3D digital twin diagnostics using AI and LiDAR, while the MODEX robot executes heavy-duty intervention with a modular, quick-change tool system. This "Recon-Execute" paradigm establishes a scientific workflow, enabling safer, data-driven predictive maintenance for urban infrastructure.
A pragmatic industrial designer focused on the synergy of logic and efficiency. I adopt an engineering-driven approach to deconstruct complex problems into their essential functional units. My design philosophy centers on balancing aesthetics with functionality, meticulously crafting every detail to deliver innovative and purposeful solutions. I am passionate about tracking technological evolution and user behavior, and I get inspired by reverse-engineering digital products to understand their core design principles.
China Universities Industrial Design Competition (CUIDC), 2024
National Bronze Award for "Pipeline Cleaning Robot"
Guangdong Universities Industrial Design Competition, 2024
Provincial Second Prize for "Pipeline Cleaning Robot"
National College Digital Art & Design Competition (NCDA)
Provincial Second Prize & Third Prize
Foshan "Mayor's Cup" Industrial Design Competition
Three works selected as Finalists
Guangdong Universities Computer Design Competition
Provincial Third Prize
XiaoHutuXian University Marketing Competition
Excellence Award