IDA 2026 IS NOW OPEN - SUBMIT BY APRIL 15 TO GET A 10% EARLY BIRD DISCOUNT.





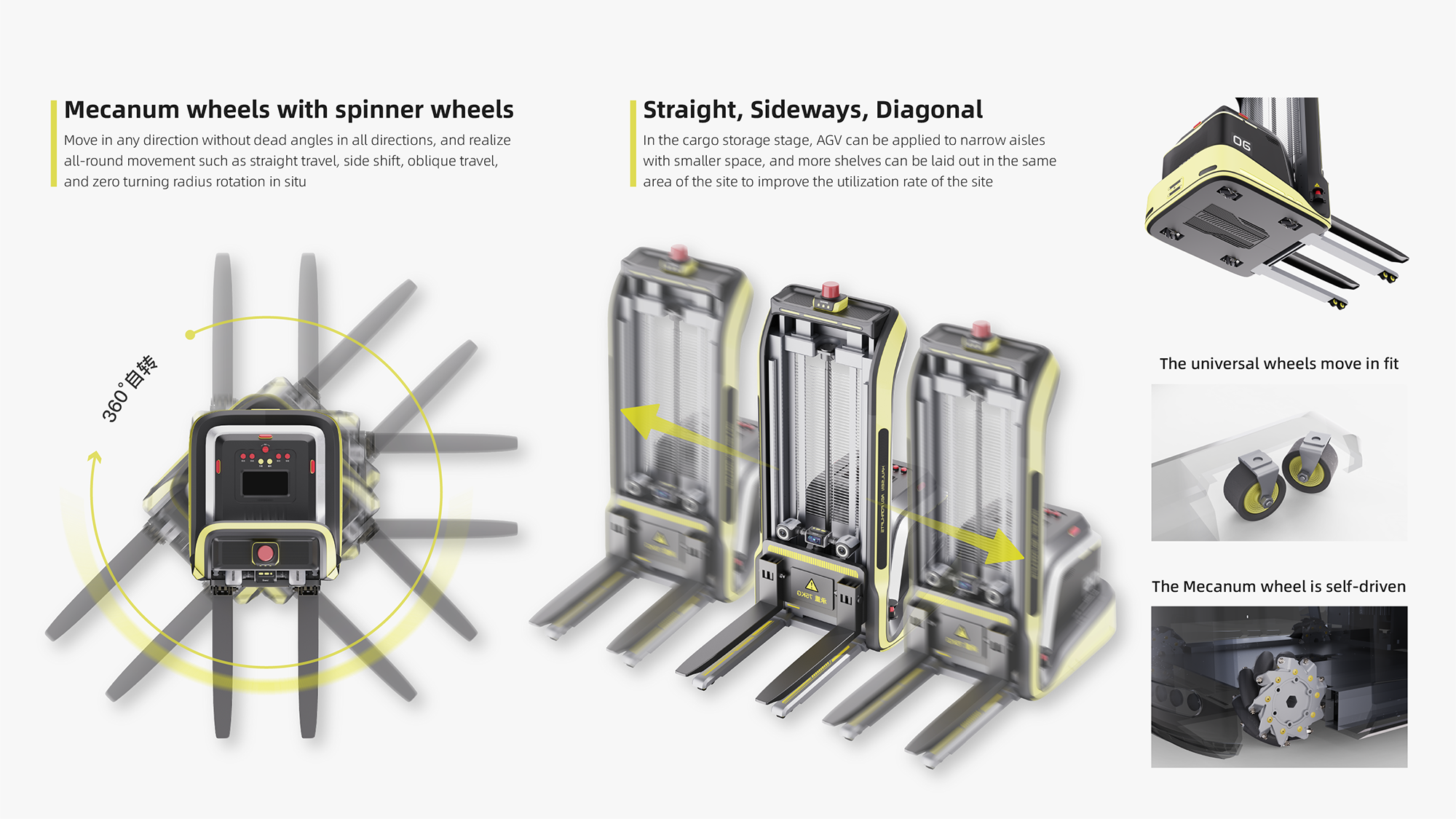


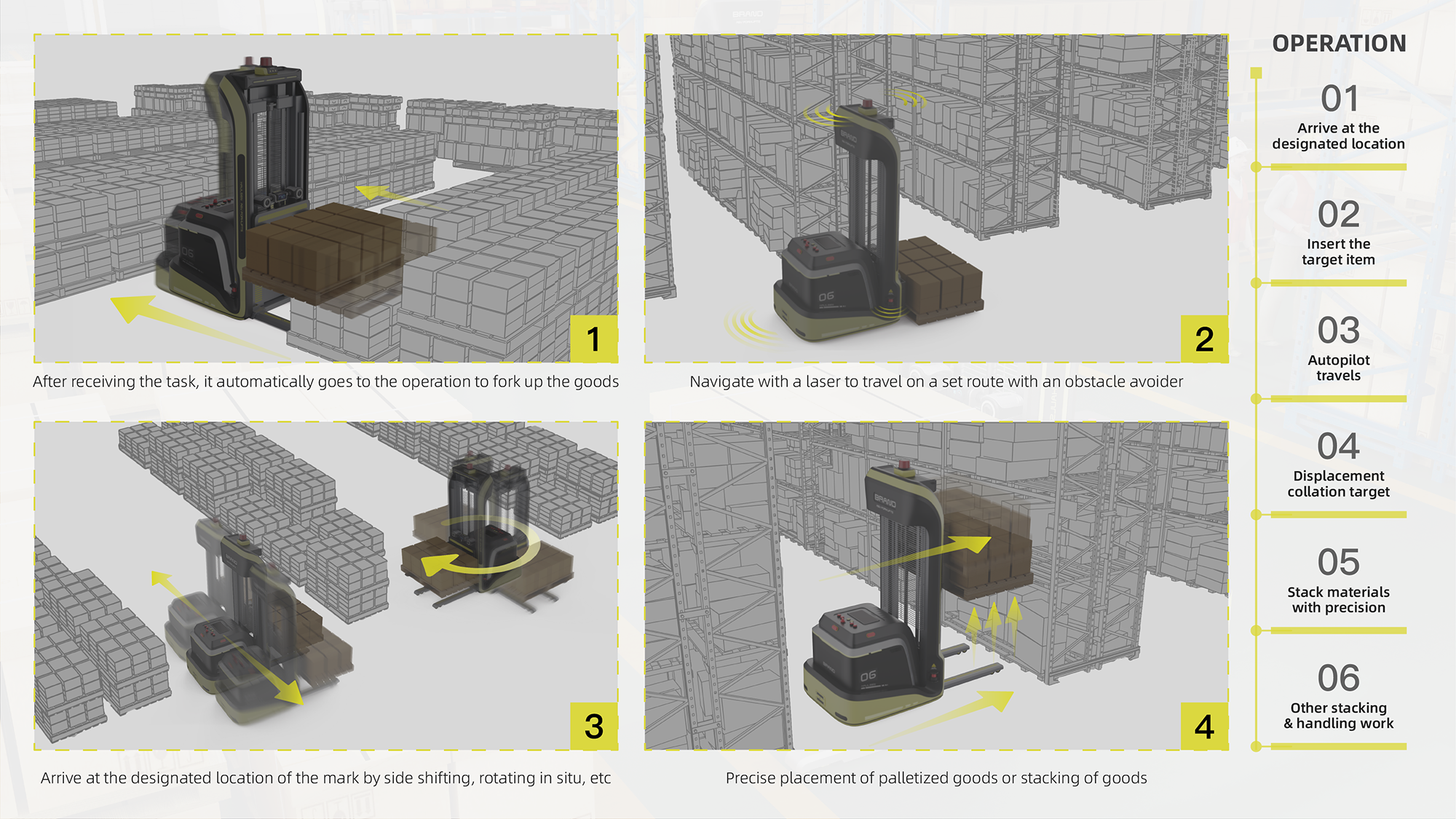
传统AGV叉车的单向轮式运动系统被麦克纳姆轮取代,使AGV可以灵活地向任何方向和各个方向移动。叉骨系统上的扫描识别仪辅助堆垛工作,并配备手电筒照亮货物的阴暗角落或弱光环境,并采用工业级SLAM激光导航定位,设备在运行过程中扫描构建自己的地图,并配备多个传感器,使操作更安全。